研究内容
人間の時間的共創の特徴解明とメカニズムのモデル化
音楽のアンサンブルやスポーツに見られるように、私たち人は他の人とリズミカルにタイミングを合わせて運動を生成することができます。しかし、人は常に遅れて周りの世界を認知しています。外界の情報が感覚器官に届くまでの時間遅れ、その情報が神経系で処理される時間遅れ、さらには、運動が生成されるまでの時間遅れなど、様々な時間遅れが存在するためです。それでも人は、その時間遅れを乗り越えて他の人と協調して運動を生成することができます。
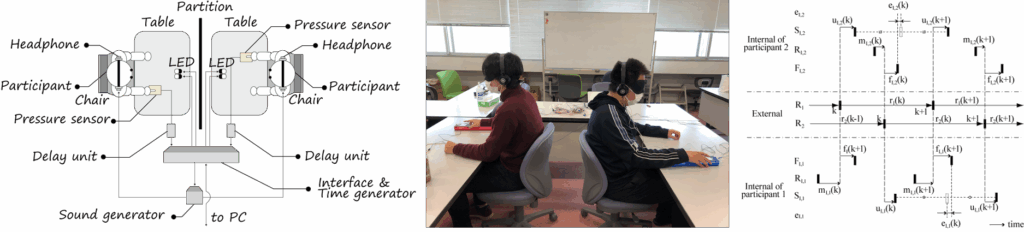
共創システム研究室では、この人と人との時間的共創の特徴とそのメカニズムを明らかにすることを目指しています。そのために、二者間指タッピング課題などの心理学的行動実験を用いた時間的共創の基礎的な特徴の解明や、情報処理理論やダイナミック・システム・アプローチを用いた人間の内部メカニズムのモデル化を行っています。
具体的には、用いるモダリティ(視覚、聴覚、体性感覚など)の影響、時間遅れの影響や刺激源の位置という空間的情報が二者間の時間的影響に与える影響を調べています。これらにより、人間同士の時間的共創を解明するだけでなく、人間と人工物の間で人間同士のような時間的共創を達成するための基礎的な知見を獲得します。
腕振りリズムアシストを用いたウェアラブル歩行トレーニングロボットの開発
人は誰かと並んで歩いていると無意識のうちに歩行のリズムが揃います。歩行障害により歩行のリズムが乱れている人は、健康な人と同期して歩くと歩行のリズムが改善することが知られています。
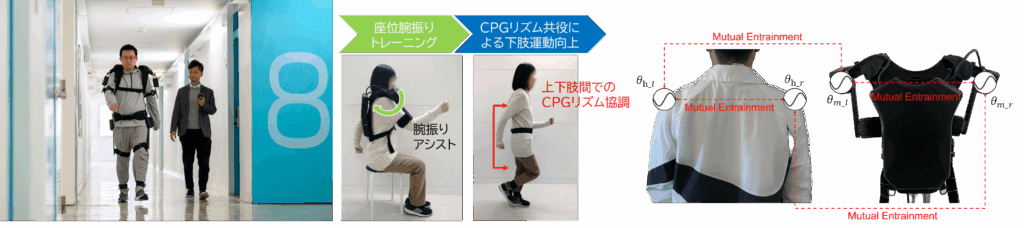
共創システム研究室では、このリズムの相互引き込み現象を利用して人の歩行リズムを整えるウェアラブル歩行トレーニングロボットの開発を進めています。ロボットは人の腕振りに同期して上腕に体性感覚刺激をリズミカルに提示します。これにより、腕振りのリズムが整い、四肢間の協調を介して歩行リズムを整えることを目指しています。ロボットは脚に力を加えないため、歩行トレーニング中の転倒リスクの低減が期待できます。これまで、健常高齢者、パーキンソン病患者、脳卒中患者の方を対象にロボットのトレーニング効果の検証を進めてきました(関東中央病院、東海大学医学部付属八王子病院、北原リハビリテーション病院との共同研究)。さらに、脚に力を加えないので、下肢の整形疾患患者(人工膝関節置換術を行った変形性膝関節症)にもロボットの適用を進めています(東京科学大学(旧東京医科歯科大学)との共同研究)。
さらに、座っている状態でロボットを使用する座位歩行トレーニングというこれまでにない歩行トレーニング方法の開発を進めています。つまり、座位でロボットと腕振りリズムをトレーニングし、その後ロボットを脱いでから歩いても歩行が改善することを目指しています。これにより、転倒リスクが少なく、介助スタッフの負担も小さい歩行トレーニングを実現できます。