Research
Clarifying the characteristics of human temporal co-creation and modeling the mechanism
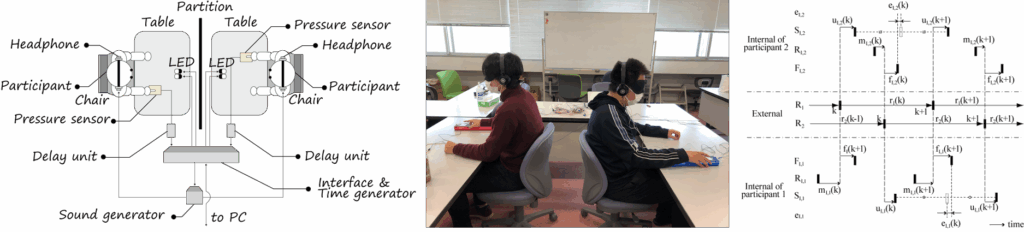
As seen in musical ensembles and sports, people can generate movements in rhythmic time with other people. However, people always perceive their environment with delays. For example, the time delay until information reaches the sensory organs, the time delay for processing in the nervous system, and even the time delay until the movement is generated. Nevertheless, people can overcome these time delays and generate movements in cooperation with others.
The Co-creation Systems Laboratory aims to clarify the characteristics of and mechanisms under temporal co-creation between people. We are investigating the basic features of temporal co-creation using psychological behavioral experiments, such as finger tapping tasks, and modeling the internal mechanisms of humans using information processing theory and dynamic systems approaches.
Specifically, we are investigating the influence of modalities used (visual, auditory, somatosensory, etc.), time delays, and spatial information such as the location of the stimulus source on the temporal influence between people. Through these investigations, we will not only elucidate temporal co-creation between people but also obtain basic knowledge for achieving temporal co-creation between humans and artifacts similar to that between humans.
Development of a wearable gait training robot using rhythmic arm swing assistance
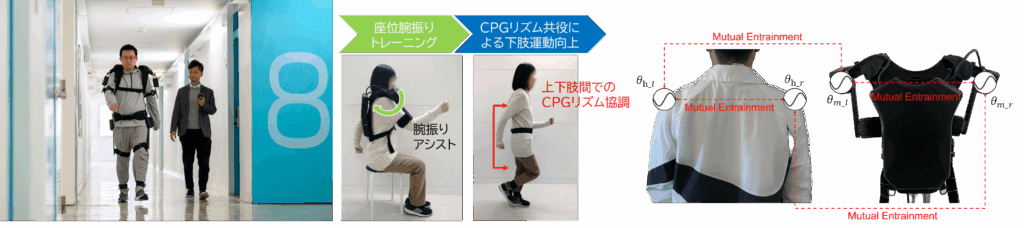
When people walk side by side with others, their walking rhythm unconsciously becomes synchronized. It is known that people with disturbed walking rhythms due to walking disorders can improve their walking rhythm by walking in sync with a healthy person.
The Co-Creation Systems Laboratory is developing a wearable gait training robot that uses this mutual entrainment phenomenon of rhythm to regulate people’s gait rhythm. The robot rhythmically presents tactile stimuli to the upper arms in sync with their arm swing. This rhythm assist aims to regulate the rhythm of the arm swing and then regulate the gait rhythm through coordination between the limbs. Because the robot does not apply force to the legs, it is expected to reduce the risk of falling during gait training. So far, we have been verifying the training effect of the robot on healthy elderly people, Parkinson’s disease patients, and stroke patients (joint research with Kanto Chuo Hospital, Tokai University Hachioji Hospital, and Kitahara Rehabilitation Hospital). In addition, because it does not apply force to the legs, we are also working to apply the robot to patients with orthopedic diseases of the lower limbs (osteoarthritis who have undergone total knee replacement surgery) (joint research with Tokyo University of Science (formerly Tokyo Medical and Dental University)).
We are also developing an unprecedented gait training method that uses the robot while seated. This will enable gait training with less risk of falls and less of a burden on caregivers.